客服热线:
客服热线:近日,来自中山大学光电材料与技术国家重点实验室的蔡鑫伦教授团队,基于铌酸锂薄膜光电子集成技术,提出了描述激光器的调频效率和啁啾带宽之间关系的理论模型,以此理论为指导,实现的激光器用于相干测距中,突破了测量速度、测距精度和测速精度的交叉限制,在自动驾驶中具有独特优势。
研究成果以“High-Performance Integrated Laser based on Thin-Film Lithium Niobate Photonics for Coherent Ranging”为题,发表于国际期刊Laser & Photonics Reviews。团队博士生王树鑫为论文的第一作者,林忠劲副教授、蔡鑫伦教授为论文的共同通讯作者。该工作得到中国国家自然科学基金委员会,合肥实验室量子科学与技术创新计划的大力支持。
02研究背景
激光雷达是一种利用激光来探测物体的位置、速度和形状的技术,在测绘、遥感、考古、航空航天等领域有着广泛的应用。近年来,激光雷达的车载应用被人们寄予厚望,它能让汽车对周围环境做到“看”得更远、更清楚、更准确、更即时,更好地实现自动驾驶。目前主流的车载激光雷达大多是飞行时间式(ToF),通过发射并探测短脉冲激光,获取光脉冲往返目标的时间来计算出被探测物体的位置信息,它的原理就是蝙蝠测距的感知声纳回波时间的方法,具有结构简单、测量速度较快等优势。然而,随着自动驾驶自动化等级的提高,ToF式激光雷达存在的局限性日益凸显,包括低人眼安全性、低抗干扰能力、位置速度不可同时测量获取、测距盲区等。
为了克服ToF激光雷达的缺陷,人们提出了调频连续波(FMCW)激光雷达,FMCW通过发送并探测频率线性变化的激光,可以同时获取被探测物体的位置和速度信息,此外,它还具有高人眼安全性、无测距盲区、高距离精度、强抗干扰能力等优势。因此,FMCW激光雷达被视为下一代激光雷达技术。扫频激光器是FMCW激光雷达中的核心关键器件,它的关键性能参数包括扫频带宽、扫频效率、扫频线性度和扫频频率,这些指标直接决定了FMCW激光雷达测距的分辨率和测量速率。迄今为止,现有的扫频激光器存在着扫频带宽和扫频效率不可兼得的难题,而且大多数扫频激光器的线性度不理想,这些难题是FMCW激光雷达性能的重要瓶颈。
针对着目前扫频激光器中存在着的难题,中山大学的团队通过混合集成III-V族增益芯片和铌酸锂薄膜(TFLN)电光芯片的方法,实现了高性能扫频激光器。铌酸锂薄膜的线性电光效应从原理上保证了激光器扫频的高线性度,进一步,设计并实现了高性能的IIIV-TFLN混合集成扫频激光器,有望在FMCW激光雷达中发挥重要作用。
03研究创新点
针对激光器难以同时满足高扫频效率和宽扫频带宽的难题,中山大学团队建立IIIV-TFLN混合集成激光器动态扫频的理论模型,厘清了扫频带宽和扫频效率相互制约的关系,并为这两个指标的同步优化提供了可行的方案,进一步实现了高性能的IIIV-TFLN混合集成扫频激光器,同时实现了扫频带宽和扫频效率性能指标上的突破。 图1 a、b分别展示了激光器的概念图和实物图。该激光器采用外腔式结构,由III-V族增益介质(RSOA)和TFLN外腔芯片构成,后者集成了双环游标滤波器、可调谐反射镜以及电光相位调制器,确保了单模输出并实现了线性、快速的激光扫频。该课题组的理论模型表明,在外腔式扫频激光器中,给定的扫频带宽下存在着扫频效率的上限,需要优化激光器结构以突破这两个参数之间的固有矛盾。基于该模型,针对扫频带宽为~3.6 GHz的设计目标,研究人员优化激光器的结构以实现最大的扫频效率(见图1 c)。如图1 d所示,激光器的扫频带宽和扫频效率分别为3.44 GHz和574 MHz/V,相比先前的工作提升了150%和50%。此外,该器件可以实现高达5 MHz的扫频频率,理论上可以支持激光雷达系统在一秒钟内进行五百万次位置与速度信息的探测。激光扫频线性度是FMCW激光雷达的另一项重要指标,高扫频非线性度会造成FMCW测距分辨率的恶化。如图1 e所示,该器件实现了接近于理想化的激光线性扫频——扫频的非线性度小于0.092%。
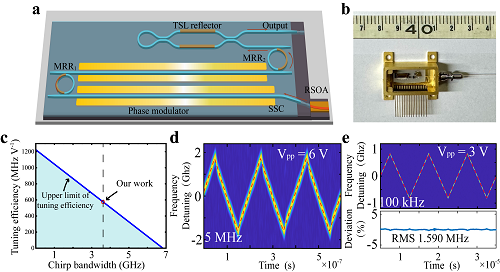
图1 a)扫频激光器激光器的概念图。b)扫频激光器激光器的实物图。c)扫频效率和扫频带宽之间的关系d)该器件可以实现5 MHz的扫频频率和3.44 GHz的扫频带宽。e)该器件进行激光扫频得到的时频图以及对应的扫频非线性度。
基于该激光器,研究人员搭建了如图2 a所示的调频连续波激光雷达系统。在静态和动态的测距/测速实验(如图2 b-g所示)中,该系统可以实现10.8 cm的测距分辨率、4.9 mm的测距精度、0.054 m/s的测速精度,这在实际应用中非常具有吸引力。
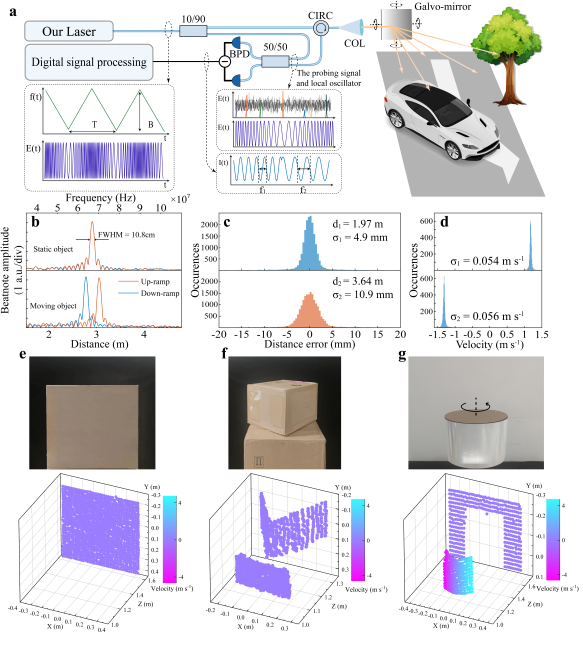
图2 a) 调频连续波激光雷达系统概念图。 b, c, d) 演示的调频连续波激光雷达可以实现10.8 cm的测距分辨率,4.9 mm的测距精度和0.054 m/s的测速精度。e, f, g) 作为检测目标的平板、堆叠的箱子和旋转的圆柱的照片,以及它们各自的带速度信息的点云。
04总结与展望
该工作提出了频率可调谐激光器中关于扫频效率和最大可实现扫频带宽的理论模型,并以此为基础,在铌酸锂薄膜集成光子学平台上演示了一个高性能的扫频激光器。该器件可以同时实现3.44 GHz的宽扫频带宽和574 MHz/V的高扫频效率,以及接近于理想的线性扫频和低至0.2微秒的扫频周期。该器件在调频连续波激光雷达系统中显示出显著的潜力,有望推动调频连续波激光雷达在自动驾驶领域的广泛应用。
论文链接:https://doi.org/10.1002/lpor.202400224