客服热线:
客服热线:作为一种光探测系统,激光雷达(LiDAR)可以实现高分辨率、高精度的测距、测速以及精确的物体感知。凭借探测距离远、相干性好、时空分辨率高等优点,激光雷达被广泛应用于机器人、自动驾驶、安防、环境监测等领域。MEMS微镜作为一种微光机电系统(MOEMS),已广泛应用于医疗、汽车、消费和**电子等众多领域。当前,业界对具有广阔前景的小型激光雷达的需求不断增长。之前,已有研究开发了大量使用电热、静电、压电和电磁驱动的微镜。其中,电磁微镜凭借体积小、偏转角度大、驱动电压低、功耗低等优点而受到广泛关注。
电磁谐振微镜在激光雷达研究中正发挥着越来越重要的作用,但空气和结构阻尼导致的能量损耗比较严重。因此,微镜当前的开发难题在于功耗和偏转角度。电路或算法调制可用于实现微镜的开环驱动。微镜的初级激励可通过固定频率信号激励实现。由于系统的阻尼作用,开环驱动会限制扫描范围和振动连续性。
自动增益电路(AGC)和锁相环(PLL)是实现MEMS谐振器闭环驱动的两种常见电路。然而,由晶体振荡器、位置敏感探测器(PSD)和模数转换器(ADC)电路组成的系统增加了芯片面积和系统复杂性。已有的研究表明,需要一种低功耗、紧凑型微镜来优化激光雷达系统。
据麦姆斯咨询介绍,东南大学的研究人员提出了一种电磁微镜驱动系统,该研究成果已发表于Sensors期刊。研究人员通过系统级建模演示了该系统的自振荡模式,为激光雷达中高性能电磁微镜芯片的研究提供了基础。该研究利用集成的压阻传感器实现了偏转角检测,具有良好的灵敏度和线性度,最大速率为24.45 mV/deg。压阻传感器集成在微镜偏转梁的末端,大大节省了空间和整体复杂性。PLL电路实现了系统驱动和频率跟踪的连续谐振。该微镜系统以紧凑的电路解决了开环驱动不稳定的问题。同时,与ADC或现场可编程门阵列(FPGA)相比,系统的复杂性和占用的芯片面积都有所减少,证实了实现低功耗和轻量级设计的可能性。
由于用微镜取代了机械扫描结构,实现了高速和高精度扫描。这些优势有助于激光雷达在环境检测和无人驾驶等应用场景中的研发。由于自振荡,该系统在仿真中实现了4000 Hz和±37.6°的稳定扫描,与之前的研究相比大大提高了偏转角度和扫描频率。本研究验证了微镜系统的有效性,为进一步研究高性能激光雷达微镜芯片奠定了基础。
集成压阻传感器的电磁微镜模块框图
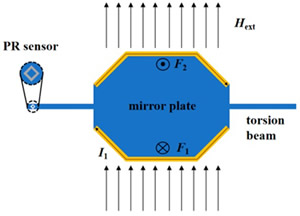
正弦电压激励驱动的电磁微镜
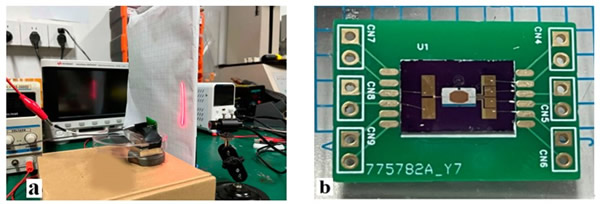
(a)微镜实验测试系统;(b)微镜PCB