客服热线:
客服热线:近日,同济大学物理科学与工程学院王占山教授和程鑫彬教授所在团队的施宇智特聘研究员在物理学顶级期刊《应用物理评论》(Applied Physics Reviews)在线发表题为《超构材料中的光镊操控技术》(Optical manipulation with metamaterial structures)的论文,被编辑选为Featured Article,并被美国物理联合会《科学之光》(AIP Scilight)报道。该论文首次归纳了超构材料光镊操控中的物理机制,总结了典型的超构材料光镊操控的应用,区分了超构材料光镊操控技术的两种典型构型:“超构光镊”(meta-tweezers)和“超构机器人”(meta-robots),如图1所示。
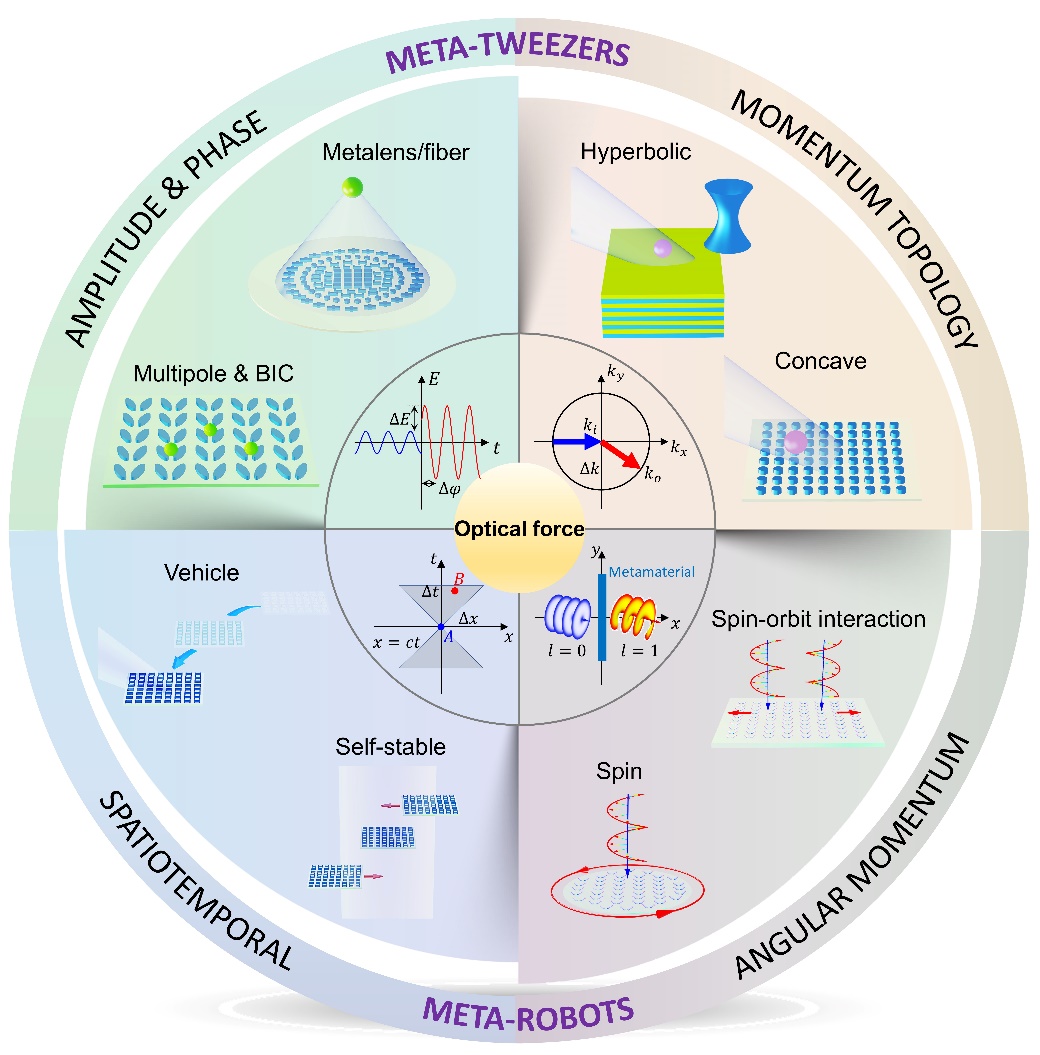
图1:超构材料光镊的典型构型分为两大类:“超构光镊”(meta-tweezers)和“超构机器人”(meta-robots)。本文从振幅和相位、动量空间、时空以及角动量四个角度总结了超构材料光镊的典型原理和应用。
光镊技术利用光和颗粒之间的动量交换在颗粒上施加光力对其进行操控,自上个世纪80年代由Arthur Ashkin教授(诺贝尔奖获得者)发明以来,在物理、生物医学等领域得到了巨大的应用。传统光镊大多依赖于折射光学或经典纳米结构产生的近场光,通常需要大而复杂的光学系统来对光的振幅相位、波矢和角动量等进行调控,不利于光镊系统的小型化和成本控制。超构材料可以在亚波长尺度提供电磁响应,能够有效地对光的多个参数进行准确调控,因而可以为光镊操控带来新的机遇。在该文中,作者首先从光镊和超构材料的基础理论角度总结了超构材料和光镊系统中用于操控的基本原理,随后介绍了“超构光镊”的几种典型操控案例,包括捕获、传输、分选,以及一些奇异光学力,包括牵引力和横向力等。
尤其,随着近年来纳米光学和加工技术的不断进步,“超构机器人”当前受到广泛的关注,其利用超构结构在光的激发下电磁响应产生直接作用于微结构的光学力。控制不同偏振态或偏振方向可以对力和力矩的大小和方向进行调控,实现一维、二维甚至三维的超构结构的运动。未来可以设计多自由度光驱动纳米机器人,在药物传输与混合、单细胞靶向治疗等生物医学领域可获得广泛的应用。
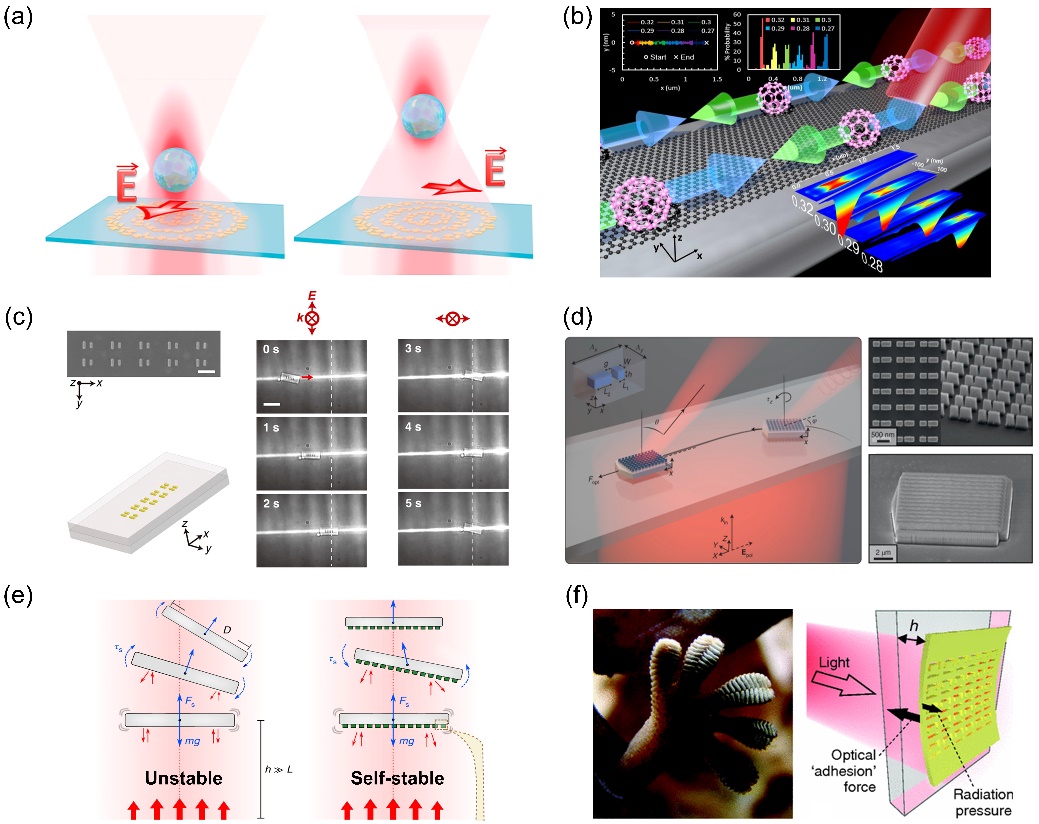
图2:超构材料光镊中光力的动态调控:a,光的不同偏振方向控制颗粒的捕获位置;b,光学势阱的动态调控用于颗粒分离;c,等离子体“超构机器人”的直线运动;d,“超构机器人”在线偏振光和圆偏振光作用下分别以直线运动和转动,实现二维运动;e,“超构机器人”在高斯光束中的自稳定现象;f,“超构机器人”可与衬底产生吸引或排斥力。
该团队还展望了超构材料光镊未来的发展方向,例如更多维度和功能的超构机器人、超构材料全息技术辅助的多功能操控、超构结构对自旋和轨道角动量的调控带来更多的光镊操控应用等。
论文链接:https://aip.scitation.org/doi/10.1063/5.0091280