 客服热线:
客服热线:近日,德国弗莱堡大学的研究人员使用高度聚焦的激光光束搭建了具有反馈控制系统的光镊,并利用多焦点聚焦实现了抓取和旋转细胞的操作。研究人员Alexander Rohrbach 表示他们的成果能够推进微型肿瘤等微小物体的具体研究。本工作目前已发表于Nature Communications。
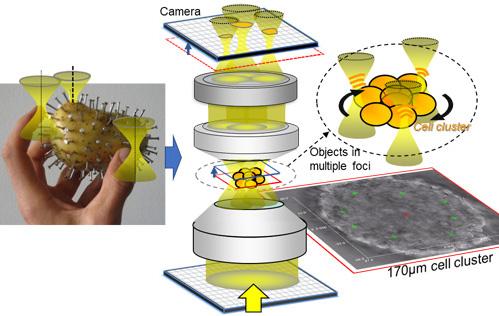
光镊抓取和旋转物体。
与传统的机械镊子不同,光镊子的显著优势是光在透过透明物体后也能够施加力或扭矩。经过多年的发展,计算机全息光镊能够任意低逐个像素地聚焦激光,以同时控制多个光镊在 3D 空间中的位置。这种方法已经发展了近 20 年,但仍无法对较大的物体(直径大于约 0.1 mm的物体)施加力和扭矩。
Rohrbach 指出光镊目前遇到的问题包括,无法在水溶液中或者以任意和稳定的方式快速旋转大型目标物体。这是因为光镊的强度过低,或者无法找到最佳的抓取位置导致物体滑落。最佳抓取位置的寻找目前依赖于研究人员实验操作光镊的能力,而缺乏有效的定位系统。因此,研究人员致力于发展可视光镊,即通过测量和分析物体上散射的光信息,从而了解抓取目标物体的形貌。这就类似于眼睛的视网膜捕获散射光,再成像的过程。
另外,虽然光镊可以穿透透明物体,但是当在显微镜下研究生物材料,例如非完全透明的微型肿瘤或小胚胎这样的细胞团时,这些细胞类似磨砂玻璃一样,导致光线在透射后是漫射的,因此是难以利用散射光分析的。
在本研究中,研究人员利用一个相机接收在穿过物体后的散焦激光的散射信号,并将该信号作为反馈信号。相机上各个光镊的光斑不对称度越高,说明焦点处的光散射越多,物体各点的折射率变化越大。这些地方就是光镊可以有效抓取物体的点。这是因为物质极化的局部变化会导致光学偶极子力的增加。
本研究定位最佳抓取位置的原理的优越性在于,激光焦点处的光散射(即动量的变化)比焦点前后的要强得多。实验中,大约5-10个光镊中的每一个都根据散射光信号确定最佳抓取位置,以便将物体向不同方向旋转。
然而,如果其中一个光镊用力过大,其他光镊可能会失去它们的夹持力。因此这个操作仍需要进一步解决和优化。将光镊这种非接触式的样品夹持系统集成到显微镜中是目前的发展趋势,并具有重要的应用意义。














