客服热线:
客服热线:人们能仅凭手指触摸,就确定水果蔬菜的品质和新鲜程度;工业机器人早就在多年前就实现了触觉感应。然而如何拾取、转动头如头发丝般粗细的物体,仍旧是一个难题。日前,弗莱堡大学微系统工程系的教授Alexander Rohrbach及其团队在Nature Communications上发表了关于这一问题的研究成果。其研究表明,几个由高度聚焦的激光组成的光镊将能够根据人们的控制拾取细胞簇,并将其旋转至任意方向。这一发现将有助于未来在显微镜下对微型肿瘤等微小物体的细节研究。
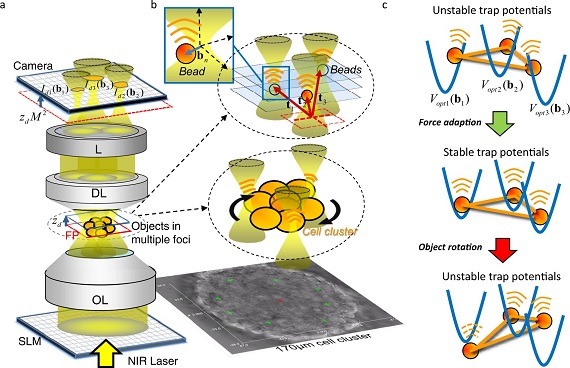
图1 工作原理图 a) 离焦干涉目标追踪系统(off-focus interferometric tracking, OFI)的安装示意图和原理。空间光调制器(SLM)在近红外激光束的照射下,在焦平面(FP,图中红色框)周围产生多个光阱,这些光阱通过两个透镜(DL和L)远心成像到CCD相机上。b) 焦平面内的物体(细胞簇或粒子)散射聚焦的光,导致相机上强度Idn(bn)重分配,重分配与物体相对于光束中心的位置相关。向量tn表示光阱相对于焦平面中心的位置。下方:由8个光学陷阱捕获的170µm大细胞群的亮场图像(由8个绿色十字架标记)。c) 普通光阱和非盲光阱的对比图。上方图中是被三个不稳定光阱捕获的硬物;根据OFI信号调整焦点位置后,捕获变得稳定(非盲捕获);移动激光焦点旋转物体,捕获再次变得不稳定
激光做成的“手指”
在科学家的研究中,用来拾取的“手指”即所谓的光镊,一种由高度聚焦的激光组成的工具。不同于机械镊子,光镊的独特优势在于:即使是在抓取透明物体时,光镊也能对物理施加作用力和扭矩。
计算全息光镊能够按像素任意成倍聚焦激光,很长时间以来一直被用于同时控制多个光抓指在三维空间中的位置。这一方法已经在实验室中应用了近20年,但一直不能对较大的物体(直径大于1/10毫米左右的物体)施加力和力矩。原因在于:由于物体太大、太笨重,光镊抑或者是力度不够,又或者是因无法找到合适的抓取位置导致物体滑落,因此无法在水溶液中以任意和稳定的方式旋转物体。关键在于:光镊之所以无法找到最佳的抓取位置,是因为这些光镊只是在盲目抓取,抓取位置完全取决于研究人员对光镊的定位能力。
非盲光镊(non-blind optical tweezer)
“非盲光镊可以通过测量和分析物体上的散射光,‘看到’抓取的目标物体,”Rohrbach解释说。“眼睛能看到各种各样的物体,是因为物体散射了阳光或室内光线,并在我们的视网膜上投射了物体的像。”光镊可以抓住透明的物体,但是,科学家们在显微镜下所研究的微型肿瘤细胞团、小型苍蝇胚胎等生物研究对象,并非是完全透明的,而是像浴室窗户上的磨砂玻璃一样,光线在透射这些物体之后呈漫反射,导致难以对其进行分析。能够看到镊子所到之处的新概念,是通过对物体后方快速成像相机上离焦的激光散射光进行分析,以作为反馈信号。相机上单个光镊的光斑越不对称,焦点处的光就越分散,从而导致物体中对应各点的折射率变化就越大。这些点是光镊可以有效抓住物体的点。在物理上,物质偏振的局部变化会增加光场偶极力。
Rohrbach说,定位最佳捕获位置原理中最惊人的是:激光焦点上的光的散射(即动量的变化)远强于焦点前后。约5到10个光镊中的每一个都应根据散射光确定最佳的抓取位置,以使物体向不同的方向旋转。但如果其中一只镊子用力过大,其他的镊子就会失去抓力。Rohrbach说:“这是一个非常复杂的优化问题,我们打算在未来几年内仔细研究。”假若能够成功,他的设想是,未来的显微镜中将能实现以非接触的方式放置样品。
文章见:Benjamin Landenberger et al, Towards non-blind optical tweezing by finding 3D refractive index changes through off-focus interferometric tracking, Nature Communications (2021). DOI: 10.1038/s41467-021-27262-z。