客服热线:
客服热线:微纳生物机器人是微纳尺度的类生命机器人,具有自动化和智能化等机器人属性;能够到达现有医疗器械难以企及的微观区域,有望革新传统医学实现疾病的精准诊疗。但是,如何构建具有自主驱动的微纳生物机器人,采用磁、光、声等外场操纵和内生能源驱动机器人穿越复杂生物屏障,实现疾病的精准治疗,并保障其生物安全性,是当前微纳生物机器人的挑战难题和前沿趋势。
中国科学院深圳先进技术研究院生物医药与技术研究所纳米中心蔡林涛研究员课题组在微纳生物机器人治疗肿瘤方面取得新突破。在团队前期工作基础上(Advanced Functional Materials,2020, 30, 1910176;ACS nano,2020,14, 11452;Biomaterials,2019,214,119226),他们选用海洋来源的趋磁细菌(AMB-1)作为模板,利用迈克尔加成反应将纳米光敏剂负载到细菌表面,构建了智能微纳生物机器人(AI microrobot),通过磁/光序贯操控,在小鼠体内实现了磁控导航、肿瘤穿透和光热消融。
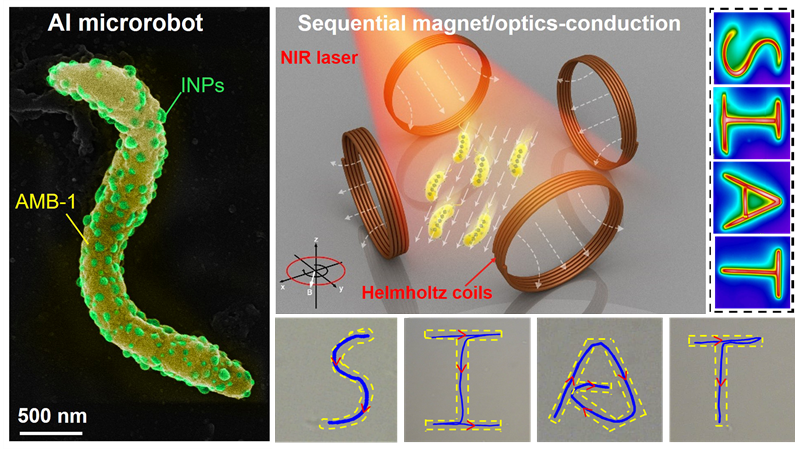
具有磁/光序贯操控性能的微纳生物机器人,在磁场下实现了微米尺度的单控群控;突破复杂的生理屏障进入到肿瘤后,近红外光触发消融肿瘤。
研究结果表明,微纳生物机器人在磁场操控下,实现了微米尺度的单一或群体精准迁移控制;通过荧光和磁共振双模成像在体内进行实时追踪。利用微纳生物机器人的磁性和缺氧集成靶向,突破复杂的生理屏障带光敏剂进入到肿瘤内部后,利用远程近红外激光触发产生局部高温,实现了肿瘤的可视化精准治疗。相关论文在线发表于Advanced Functional Materials(DOI:10.1002/adfm.202008262)。
项目获得国家自然科学基金、科技部国际合作、中科院重点部署项目、广东省纳米医药重点实验室、深圳市科技计划等基金的大力支持。