客服热线:
客服热线:
近日,南开大学化学学院、功能高分子材料教育部重点实验室刘遵峰教授、安阳师范学院李晶晶博士等人围绕光响应型致动器的研究和应用进行了综述讨论,如图1所示。该综述主要介绍了光致动器的驱动机理(光热和光化学驱动)、光致动器材料(无机物、晶体、水凝胶、液晶弹性体等)、以及其制备设计策略(涂覆、3D 打印、湿纺、光刻、直写等)。此外,该综述还介绍了光热致动器的构造(薄膜、纤维、块体、微纳结构),并简单介绍了光热致动器的运动模式(弯曲、旋转、伸长/收缩)。文中还对光致动器在软体机器人(爬行、跳跃、游泳机器人)和机械手这两个智能仿生领域的应用作了主要总结及评述。该综述论文对光热致动器的响应时间、驱动幅度、以及驱动温差等驱动性能进行了系统梳理和对比分析;对光化学致动器的类型及性能作了简单的总结。
该综述对光致动器未来面临的挑战进行了深入分析和展望。目前大多数致动器在仿生运动领域的应用处于实验基础研究阶段,需要开发高性能的光致动器来满足实际应用,发现有效的光驱动机理并运用合理的设计手段实现致动器高仿生运动。大多数致动器在外界光源刺激如红外光、模拟可见光、紫外光进行,且所处的环境较为温和,而利用可再生资源太阳光进行驱动且实现在极限环境下(强酸、强碱等)的驱动响应少之甚少。其次,将光致动器的机械变形与传感元件组合实现带有传感功能的致动器也是重要的发展方向。未来利用先进的制备技术及发现新的光驱动机理和驱动材料,实现制动器的精细操控和高性能驱动,从而应用于智能仿生运动和其他智能器件。
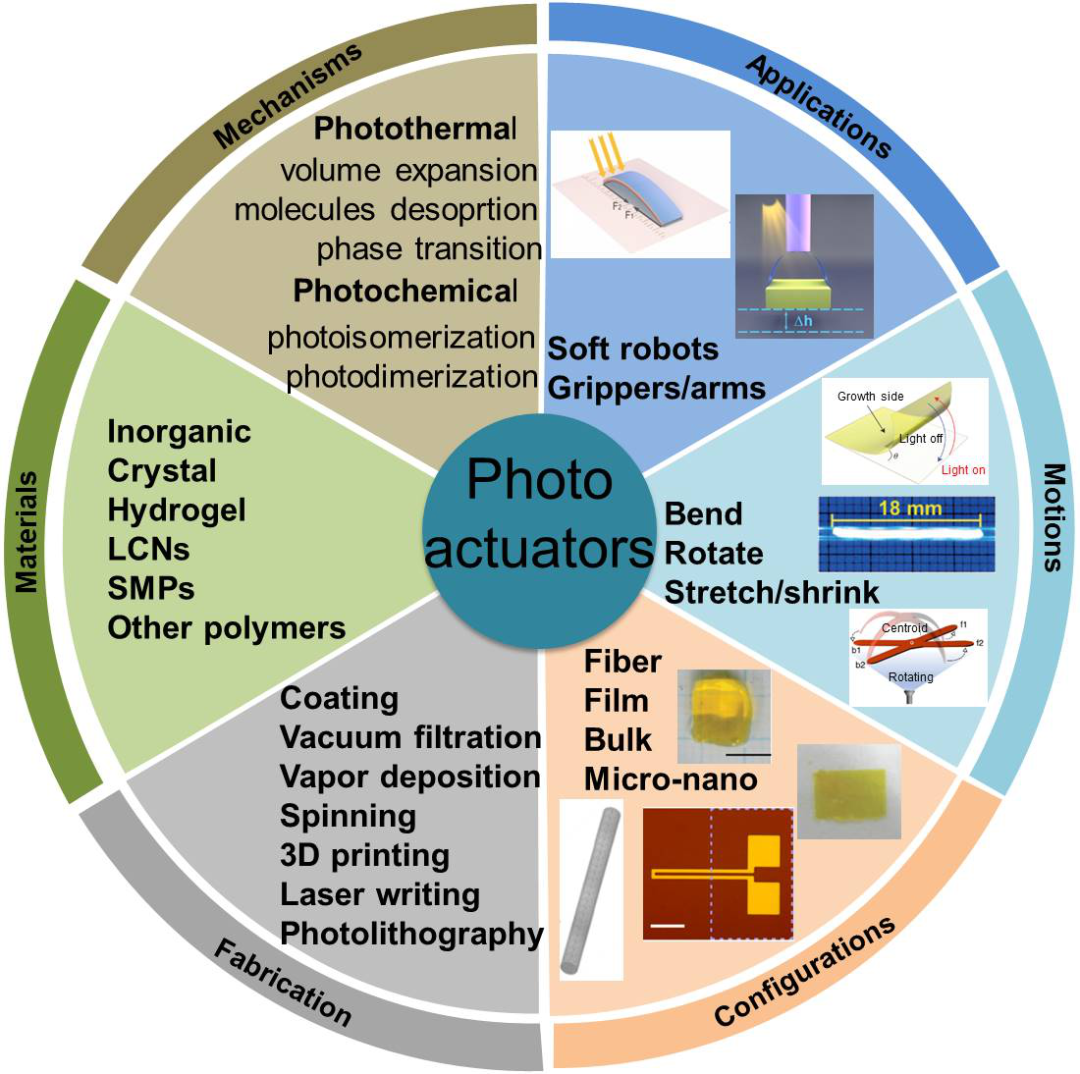
图1:光致动器综述概览图
相关综述发表在Adv. Optical. Mater. 杂志,题为 “Recent Advances in Photoactuators and Their Applications in Intelligent Bionic Movements”(DOI:10.1002/adom.202000886)。