客服热线:
客服热线:当今最先进的量子系统之一是基于在微波状态下工作的超导电路。然而微波传播损耗大,对于未来连接多台量子计算机组建量子网络是一个挑战,这不利于量子网络的发展。由于光学量子态能够以超低衰减的方式传播,并且能够抵抗热噪声,而机械系统可以为光子和各种固态量子信息处理平台之间提供通用接口,因此未来一个最有希望的解决方法是将微波与光场通过机械系统纠缠在一起,然后使用光链路进行长距离组网。但是由于波长为mm的微波和μm的光波之间相差太远,这种纠缠传递并不容易。
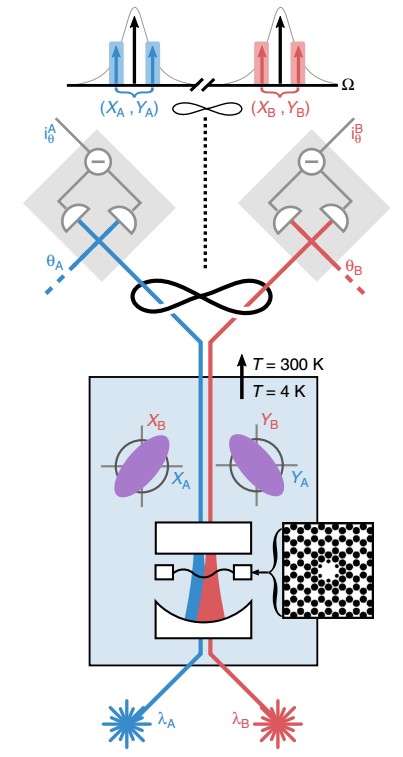
图1 两个激光器(红色和蓝色)同时驱动一个保持在氦气流低温恒温器中的光机械腔。插图显示了软夹机械谐振腔的结构(白色代表Si3N4,黑色代表孔)。压缩相空间椭圆的存在说明了光场在离开光机械腔时具有非局域关联。两个光束离腔后是物理分离的,分别与本振光锁相在θA和θB通过平衡零差探测器同时检测。图的顶部显示了相关光学模式的频率图。黑色为两个腔驱动器,两边散布的激光A和B的机械边带分别以蓝色和红色显示。
如图1所示,研究人员通过将两束激光从同一个机械谐振腔中反射而使它们产生纠缠作用。这种机械谐振腔由3.6 mm×3.6 mm×20 nm的氮化硅薄膜制成,并用一系列的孔来隔离中央衬垫的运动,使得该设备足够灵敏来显示量子反作用力(激光光束中量子振幅波动对机械系统的作用力)。激光器A和B入射到薄膜上,其量子振幅涨落驱动机械系统,同时机械系统的运动也调制在激光器的相位上,这种非局域联合模的压缩导致了两个激光器产生有质动力学纠缠。
这种产生纠缠的方式具有非破坏性,并且纠缠从低温机械介质一直保存到在室温零拍探测器分析的激光束中。而且光子与薄膜之间的相互作用与波长无关,在实验中实现了100 nm以上跨度的纠缠,原则上可实现微波——光学纠缠。此外,虽然纠缠机械接口驻留在低温,它是与高效的光提取和收集兼容的,因此可以在室温下直接测量纠缠而无需噪声减除或其他间接推断。值得注意的是,机械接口原则上也可以存储量子信息。对于实验测试的设备即使在10 K操作下,存储时间约为1 ms,也比在光纤中的存储时间长且简便。以薄膜光机械系统为基础的机械介导微波光学纠缠可以为基于超导量子比特的量子计算机网络提供急需的关键技术。